Image capturing and AI model inference with Video infer Service¶
Statement
- The operating system used in this test is Ubuntu 18.04
- The camera used in this test is Hikvision DS-IPC-B12-1
- The AI model inference is running on CPU with video infer service
- The AI model used in this test is ssd_mobilenet_v1_coco_2017_11_17
- The MQTTBox is used as MQTT client in this test
Workflow¶
- Step 1: Install Baetyl on Ubuntu18.04, more detailed contents please refer to Quickly install Baetyl
- Step 2: Write all services configuration file, and start Baetyl with command
sudo systemctl start baetyl. Also, we can view the Baetyl’s running status and all running containers through commandsudo systemctl status baetylanddocker ps. More detailed contents of all services configuration please refer to Configuration - Step 3: Select MQTTBox as the MQTT client that connect to BAETYL framework, more detailed contents please refer to Device connect to Hub Service
- Step 4: Subscribe topic
video/infer/resultand observe whether it can be received normally
The workflow of above operation is as follow:
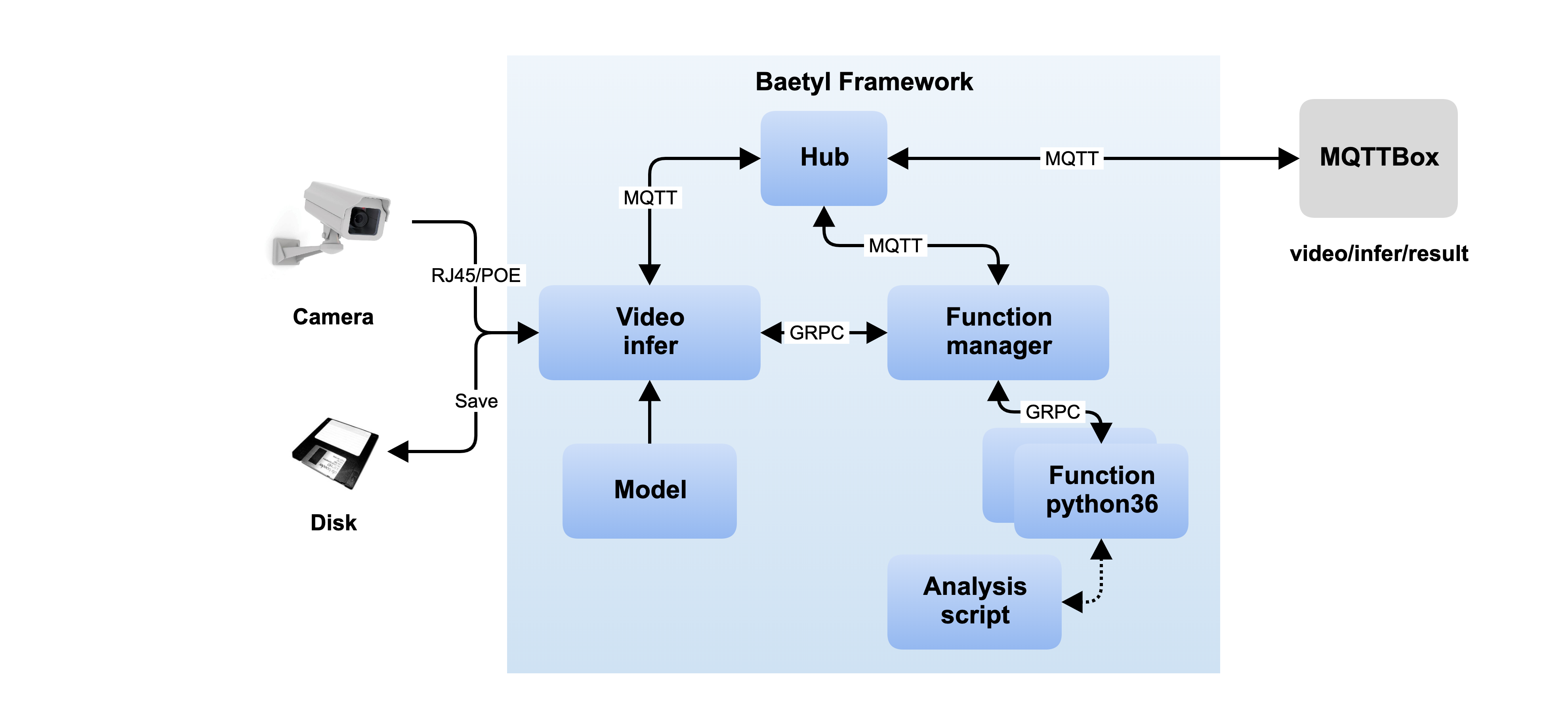 Image capturing and AI model inference with Video infer Service
Image capturing and AI model inference with Video infer Service
Configuration¶
The application configuration of Baetyl is located in var/db/baetyl/application.yml, more detailed contents are as follows:
version: V0
services:
- name: localhub
image: 'hub.baidubce.com/baetyl/baetyl-hub:latest'
replica: 1
ports:
- '1883:1883'
mounts:
- name: localhub-conf
path: etc/baetyl
readonly: true
- name: localhub-persist-data
path: var/db/baetyl/data
- name: demo-log
path: var/log/baetyl
- name: function-manager
image: 'hub.baidubce.com/baetyl/baetyl-function-manager:latest'
replica: 1
mounts:
- name: function-manager-conf
path: etc/baetyl
readonly: true
- name: demo-log
path: var/log/baetyl
- name: function-python
image: 'hub.baidubce.com/baetyl/baetyl-function-python36:0.1.6-opencv41'
replica: 0
mounts:
- name: function-python-conf
path: etc/baetyl
readonly: true
- name: function-python-code
path: var/db/baetyl/code
readonly: true
- name: image-data
path: var/db/baetyl/image
- name: video-infer
image: 'hub.baidubce.com/baetyl-beta/baetyl-video-infer:latest'
replica: 1
mounts:
- name: infer-person-model
path: var/db/baetyl/model
readonly: true
- name: image-data
path: var/db/baetyl/image
- name: demo-log
path: var/log/baetyl
- name: video-infer-conf
path: etc/baetyl
readonly: true
volumes:
- name: localhub-conf
path: var/db/baetyl/localhub-conf
- name: localhub-persist-data
path: var/db/baetyl/localhub-persist-data
- name: demo-log
path: var/db/baetyl/demo-log
- name: function-manager-conf
path: var/db/baetyl/function-manager-conf
- name: function-python-conf
path: var/db/baetyl/function-python-conf
- name: function-python-code
path: var/db/baetyl/function-python-code
- name: image-data
path: var/db/baetyl/image-data
- name: remote-mqtt-conf
path: var/db/baetyl/remote-mqtt-conf
- name: infer-person-model
path: var/db/baetyl/infer-person-model
- name: video-infer-conf
path: var/db/baetyl/video-infer-conf
The configuration of baetyl-hub service is located in var/db/baetyl/localhub-conf/service.yml, more detailed contents are as follows:
listen:
- tcp://0.0.0.0:1883
principals:
- username: test
password: hahaha
permissions:
- action: 'pub'
permit: ['#']
- action: 'sub'
permit: ['#']
logger:
path: var/log/baetyl/localhub-service.log
level: "debug"
The configuration of baetyl-function-manager service is located in var/db/baetyl/function-manager-conf/service.yml, more detailed contents are as follows:
server:
address: 0.0.0.0:50051
hub:
address: tcp://localhub:1883
username: test
password: hahaha
functions:
- name: analyse
service: function-python
instance:
max: 10
logger:
path: var/log/baetyl/func-service.log
level: "debug"
The configuration of baetyl-function-python service is loacated in var/db/baetyl/function-python-conf/service.yml, more detailed contents are as follows:
functions:
- name: 'analyse'
handler: 'analyse.handler'
codedir: 'var/db/baetyl/code'
logger:
path: "var/log/baetyl/python-service.log"
level: "debug"
The configuration of baetyl-video-infer service is located in var/db/baetyl/video-infer-conf/service.yml, more detailed contents are as follows:
hub:
address: tcp://localhub:1883
username: test
password: hahaha
video:
uri: "rtsp://admin:admin@192.168.1.2:554/Streaming/channels/1/"
limit:
fps: 1
infer:
model: var/db/baetyl/model/frozen_inference_graph.pb
config: var/db/baetyl/model/ssd_mobilenet_v1_coco_2017_11_17.pbtxt
process:
before:
swaprb: true
width: 300
hight: 300
after:
function:
name: analyse
functions:
- name: analyse
address: function-manager:50051
logger:
path: var/log/baetyl/infer-service.log
level: "debug"
NOTE:
- The
uriconfiguration item stands for the address of IP-camera, it’s normal format isrtsp://<username>:<password>@<ip>:<port>/Streaming/channels/<stream_number><username>and<password>are the login authentication element<ip>is the IP-address of camera<port>is the port number of RTSP protocol, the default value is554<stream_number>is the channel number, if it is equal to1, it indicates that the main stream is being captured; if it is equal to2, it indicates that the secondary stream is being captured
Besides, video infer service can also support to capture frame from USB-camera and video file. In addition, if the captured device is USB-camera, the uri configuration item is deviceID, the normal value of it is 0, and also need to map the device /dev/video0 into the container. If the captured device is an video file, the uri configuration item is the path of the video file, and also need to mount it as volume on video infer service. More detailed contents about volume create and mount on service please refer to How to correctly create and mount volume on service.
For example, the configuration of USB-camera are as follows:
video:
uri: "0"
limit:
fps: 1
And it also need to map device /dev/video0 to video infer service, more detailed contents are as follows:
version: V0
services:
- name: video-infer
image: 'hub.baidubce.com/baetyl-beta/baetyl-video-infer:latest'
replica: 1
devices:
- /dev/video0 # map the device `/dev/video0` to container
mounts:
- name: infer-person-model
path: var/db/baetyl/model
readonly: true
- name: image-data
path: var/db/baetyl/image
- name: demo-log
path: var/log/baetyl
- name: video-infer-conf
path: etc/baetyl
readonly: true
It is not difficult to find that the above mapping method also applies to serial port device and other mounted devices.
Test and verification¶
As mentioned in the beginning of this document, we select an object detection model of tensorflow framework(ssd_mobilenet_v1_coco_2017_11_17) which can be used to detection person, banner, apple and other fruits. Here, we provide an example python script(be used in baetyl-function-python service) of person detection, more detailed contents are as follows:
#!/usr/bin/env python
# -*- coding:utf-8 -*-
"""
function to analyse video infer result in python
"""
import numpy as np
location = "var/db/baetyl/image/{}.jpg"
classes = {
1: 'person'
}
def handler(event, context):
"""
function handler
"""
data = np.fromstring(event, np.float32)
mat = np.reshape(data, (-1, 7))
objects = []
scores = {}
for obj in mat:
clazz = int(obj[1])
if clazz in classes:
score = float(obj[2])
if classes[clazz] not in scores or scores[classes[clazz]] < score:
scores[classes[clazz]] = score
if score < 0.6:
continue
objects.append({
'class': classes[clazz],
'score': score,
'left': float(obj[3]),
'top': float(obj[4]),
'right': float(obj[5]),
'bottom': float(obj[6])
})
res = {}
res["imageDiscard"] = len(objects) == 0
res["imageObjects"] = objects
res["imageScores"] = scores
res["publishTopic"] = "video/infer/result"
res["messageTimestamp"] = int(context["messageTimestamp"]/1000000)
if len(objects) != 0:
res["imageLocation"] = location.format(context["messageTimestamp"])
return res
If you want to detect other supported object, modify it directly. The supported detection object please refer to mscoco_label_map.
When everything is done, we start Baetyl and view the baetyl running status and running containers through the command sudo systemctl status baetyl and docker ps.
 the running status of baetyl
the running status of baetyl
 the running containers
the running containers
We can find the Baetyl service is running, and the running containers include: baetyl-hub, baetyl-function-manager, baetyl-function-python and baetyl-video-infer.
Then we start MQTTBox and set the connection configuration. If it works normally, we can find MQTTBox is connecting to baetyl-hub service.
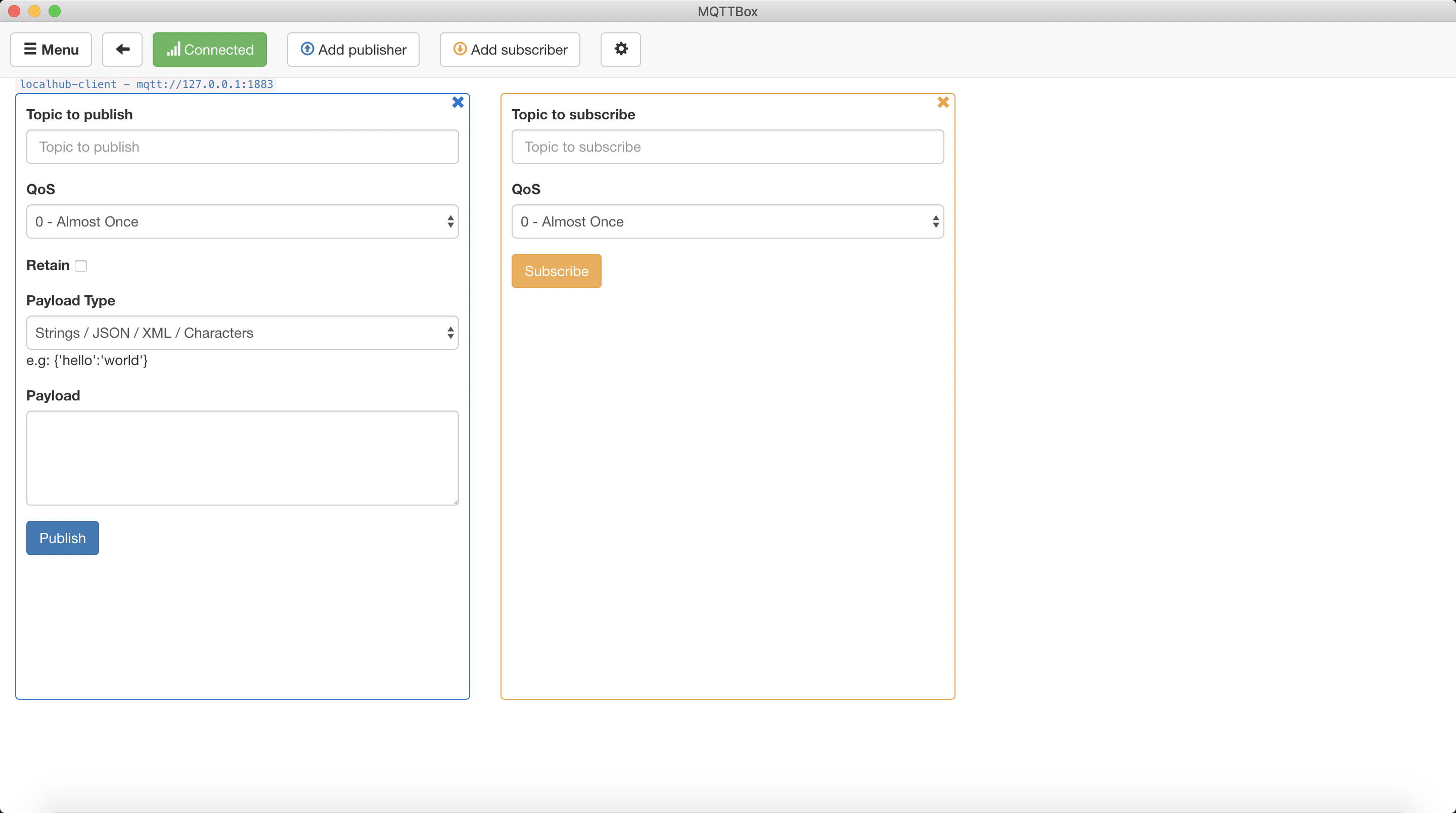 MQTTBox is connection to baetyl-hub service
MQTTBox is connection to baetyl-hub service
As mentioned in workflow, we subscribe topic video/infer/result through MQTTBox, and observe the message receiving result.
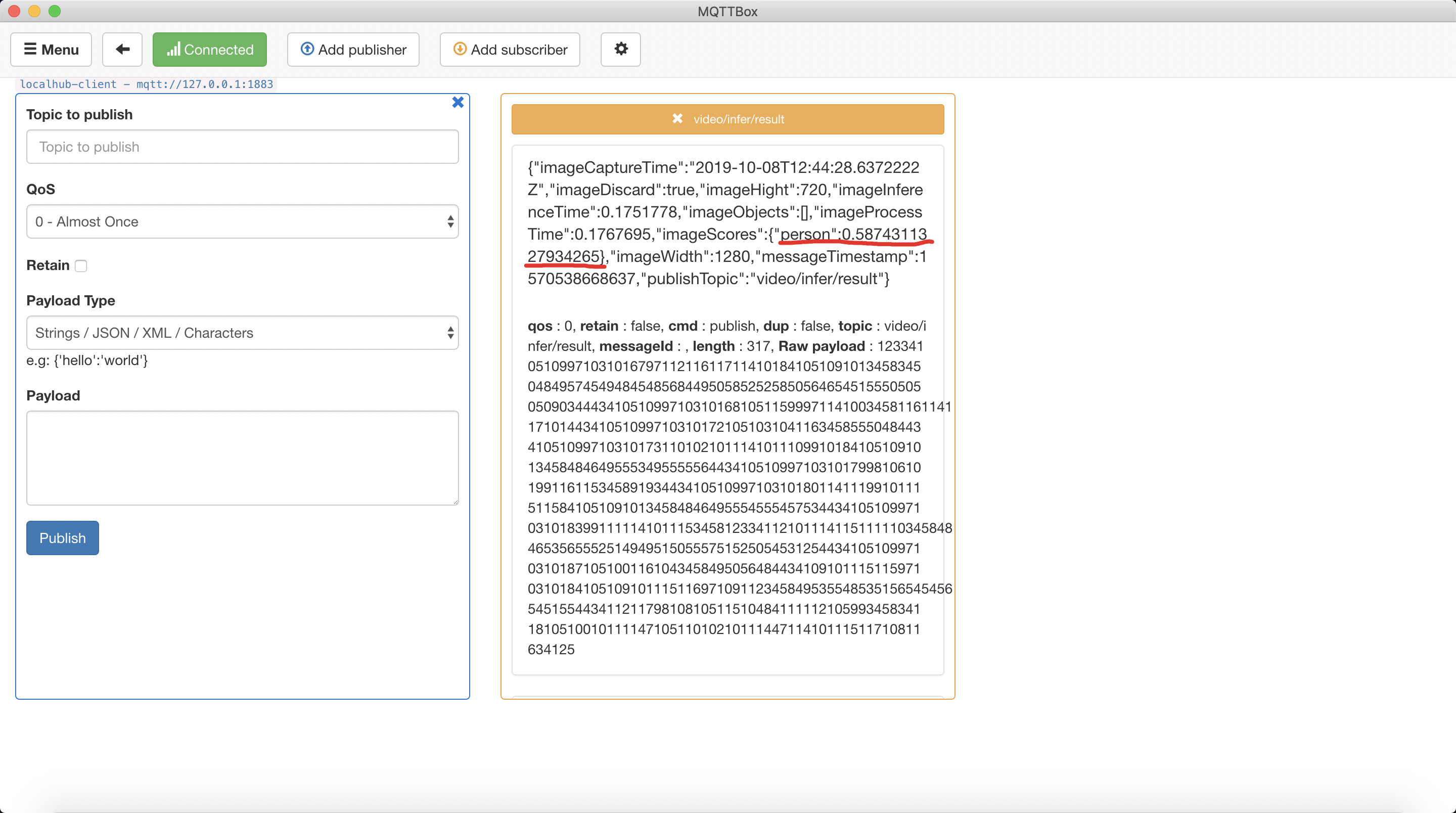 MQTTBox receive message, none person
MQTTBox receive message, none person
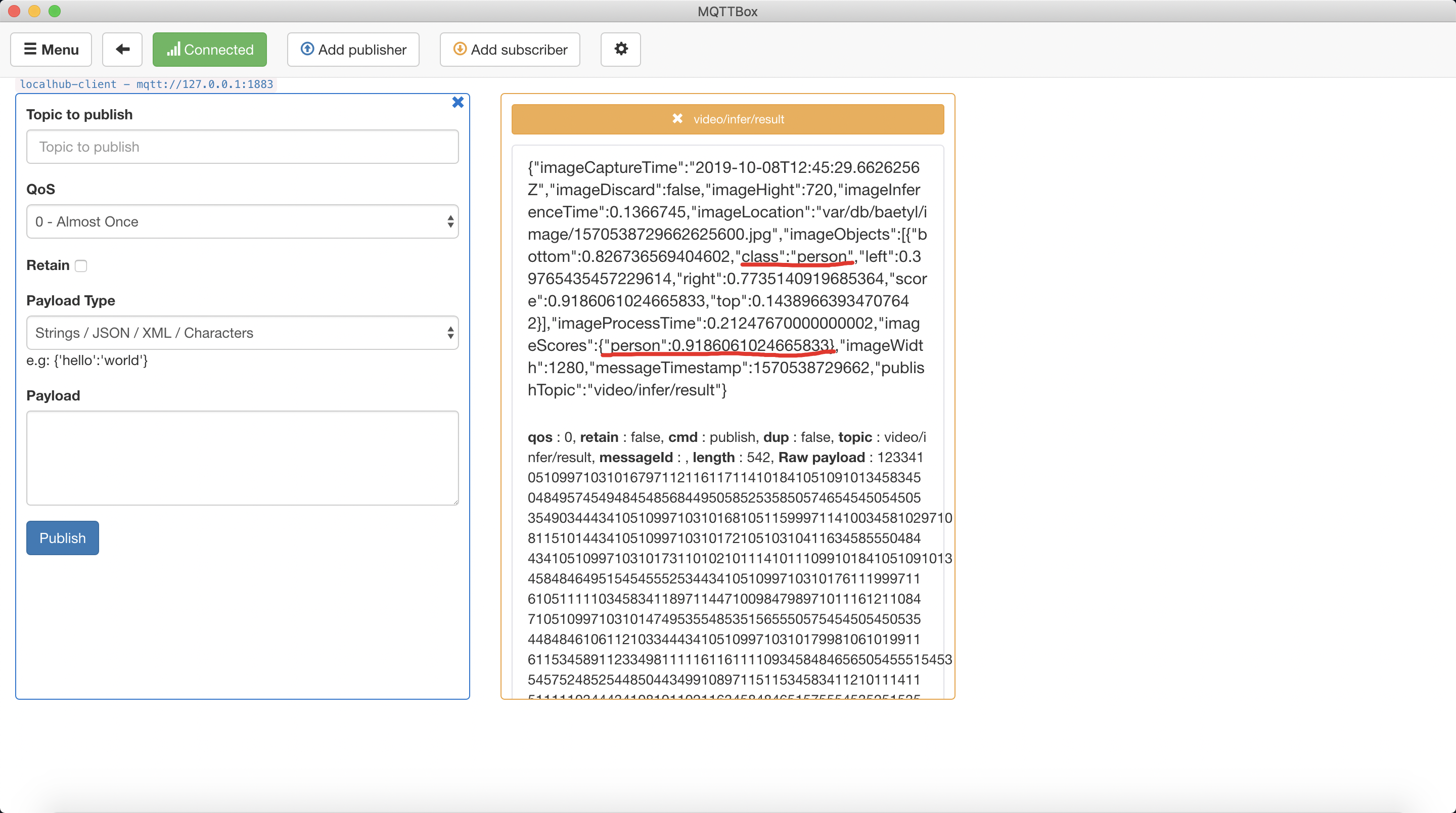 MQTTBox receive message, person
MQTTBox receive message, person
As above shown, one image shows thant it has detected person, and the other one has not detected person. Compare with them, we can find the message has class item when person detected. Besides, it also shows the location information of the detected person. That is to say we can mark the edge of the detected person with it. An example python script was provided in here.
In summary, we have implemented IP-camera frame capturing and AI model inference based on the video infer service.